SBDQ-33可编程控制器系统应用实训考核装置
一、产品概述
可编程控制器系统应用实训考核装置以模块化设计,要求符合可编程控制器系统应用编程职业技能等级标准要求。系统需融入机械传动技术、电子电工技术、智能传感技术、可编程控制技术、机器视觉技术、计算机技术、串口通信技术、以太网通讯技术等先进制造技术,涵盖机械制造与自动化、电气自动化、机电一体化、机电设备维修与管理、物联网、智能传感、智能制造等多门学科的专业知识。满足可编程控制器系统应用编程职业技能等级标准的考核要求。
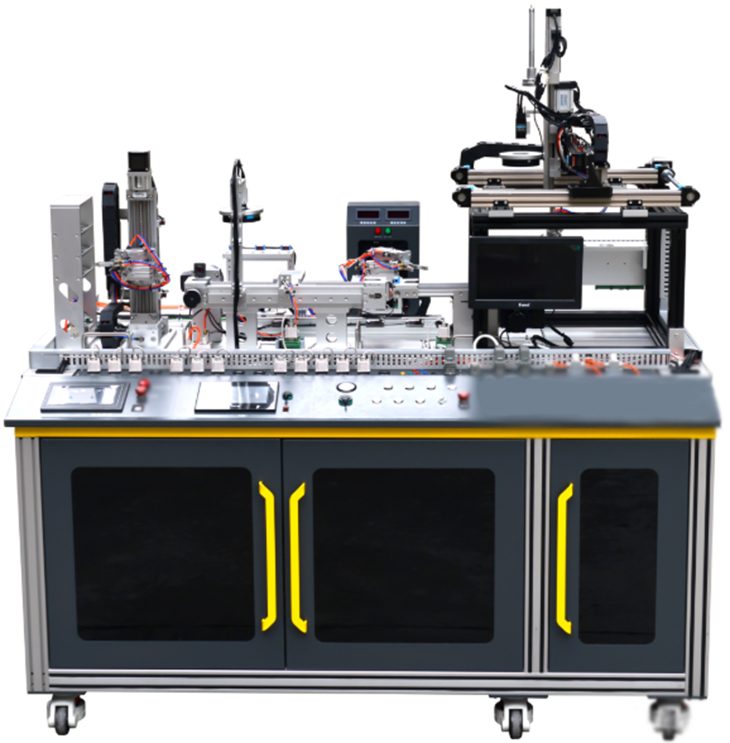
(图片仅供参考,具体以实物配置为准)
二、技术要求
2.1基础实训模块:端子排、PLC基础控制模块;
l 可完成的内容:
1.输入回路连接
2.输出回路连接
3.外围设备的连接
4.可编程控制器基本逻辑指令编程
5.可编程控制器应用指令编程
2.2电气安装模块:交流接触器、继电器;
l 可完成的内容:
1.输入回路连接
2.输出回路连接
3.外围设备的连接
4.可编程控制器基本逻辑指令编程
5.可编程控制器应用指令编程
2.3外围控制器套件:PLC及扩展模块、触摸屏、步进、伺服、变频器;
l 可完成的内容:
1.外围设备的连接
2.可编程控制器参数配置
3.人机界面参数配置
4.扩展模块参数配置
2.4桁架机械手模块:磁性开关、光电开关、气缸、电磁阀;
l 可完成的内容:
1.输入回路连接
2.输出回路连接
3.外围设备的连接
4.可编程控制器基本逻辑指令编程
5.可编程控制器应用指令编程
6.人机界面编程
7.I/O 口连接的调试
8.人机界面的调试
9.简单控制系统的调试
2.5分拣模块变频器、三相:电机、编码器、光纤传感器、光电传感器、视觉系统;
l 可完成的内容:
1.独立轴速度控制系统设计
2.工业视觉系统设计
2.6独立轴速度控制系统编程
1.可编程控制器参数配置
2.独立轴运动控制系统参数配置
3.工业视觉系统配置
4.独立轴速度控制系统调试
2.7旋转供料模块步进系统:减速器;
l 可完成的内容:
1.独立轴角度位置控制系统设计
2.可编程控制器参数配置
3.独立轴运动控制系统参数配置
4.独立轴角度位置控制系统编程5.独立轴角度位置控制系统调试
2.8输送模块:伺服系统、导杆气缸、气动手抓、直线模组;
l 可完成的内容:
1.独立轴直线位置控制系统设计
2.可编程控制器参数配置
3.独立轴运动控制系统参数配置
4.独立轴直线位置控制系统编程
5.独立轴直线位置控制系统调试
2.9立体仓库模块:步进系统、无杆气缸、丝杆模组;
l 可完成的内容:
1.独立轴直线位置控制系统设计
2.可编程控制器参数配置
3.独立轴运动控制系统参数配置
4.独立轴直线位置控制系统编程
5.独立轴直线位置控制系统调试
2.10龙门搬运模块:伺服系统、直线模组;
l 可完成的内容:
1.独立轴直线位置控制系统设计
2.可编程控制器参数配置
3.独立轴运动控制系统参数配置
4.独立轴直线位置控制系统编程
5.独立轴直线位置控制系统调试
2.11温度控制模块:显示仪表,控制电路板;
l 可完成的内容:
1.简单过程控制系统设计
2.简单过程控制系统参数配置
3.简单过程控制系统编程
4.简单过程控制系统调试。
三、技术参数
3.1输入电源:AC380V±10% 50HZ
3.2输入功率:≤3 kw
3.3单台设备外形尺寸(长宽高):≤1800mm×1200mm×2000mm
3.4安全要求:具有接地保护、漏电保护功能,安全性符合相关的国家标准。采用高绝缘的安全型插座及带绝缘护套的高强度安全型实验导线。
四、模块功能要求
4.1 实训台要求:训台承重主体为铝型材拼接而成,侧封板为钣金;为功能模块的安装提供标准的安装接口。保证稳定牢固。预留有标准气源和电气接口安装位置,根据模块的使用情况进行功能的扩展。为功能模块、功能套件提供稳定的电源。平台上可牢固安装多种多功能多应用模块。实现模块的自定义位置安装,实训台内部用于模块和工具存放。
4.2 工件套装:件套装是实训项目的工作对象,主要由工件一、工件二组成。根据实训项目的不同可以单独或组合使用工件套装完成不同的作业流程。
4.3 电气接口套件:配机电一体化功能模块,为模块提供稳定的电源和控制器资源(IO信号、网络数据)。
主要包含:电气接口模块、工业交换机、接线端子等。
接线端子包含通用接线端口和安全连接插座,适用于两种方式的接线
4.4 外围控制器套件:过PLC和触摸屏等器件的数据交互,完成对各功能模块的控制。主要包括:可编程控制器(PLC)、触摸屏、伺服系统、总线远程I/O模块等组成。
4.5 基础实训模块:基础PLC实训模块、网孔板、固定底板、快速电路连接器、接线端子、不锈钢拉手等组成。用于PLC基础逻辑指令,应用指令的编程练习。掌握简单的PLC 编程控制相关技能。
4.6 电气安装模块:接触器、继电器、网孔板、固定底板、快速电路连接器、接线端子、不锈钢拉手等组成。用于电机控制系统的安装设计,通过PLC输入输出控制,完成三相电机的正反转控制。掌握简单的PLC IO 控制相关技能。
4.7 旋转供料模块由步进旋转供料机构、旋转台、固定底板等组成。 PLC发出控制命令控制步进电机将料盘旋转到指定工位。学生可掌握步进控制系统在自动生产线中的应用和控制方法。
实训任务设计可以参考教学资源中实训指导书里面的案例,用户亦可自主进行应用拓展。
★4.8 桁架机械手模块:气缸执行机构、固定底板、快速电路连接器等组成。 用于搬运旋转供料模块供出的工件一,通过伸缩气缸、气动夹爪进行夹料,并由气动滑台将工件一搬运到下一单元模块。PLC通过数字量输入输出控制,完成零件的夹取与搬运控制。掌握简单的PLC IO 控制相关技能。可以与其他模块进行组合,实现不同的实训任务,实训任务设计可以参考教学资源中实训指导书里面的案例,用户亦可自主进行应用拓展。
4.9 分拣模块:三相异步电机、编码器、视觉系统、传送机构、底板等组成。通过独立轴速度控制可以用于工件一的分拣输送,视觉系统检测工件一的颜色或形状,根据订单需求进行套件的分拣。
可以与其他模块进行组合,实现不同的实训任务,实训任务设计可以参考教学资源中实训指导书里面的案例,用户亦可自主进行应用拓展。
4.10 输送模块:伺服电机、机械手、直线模组、底板等组成。通过独立轴位置控制可满足工件一的多点位输送,例如将工件一输送至温控模块进行烘干,烘干完成后将工件一输送至立体仓库单元。
可以与其他模块进行组合,实现不同的实训任务,实训任务设计可以参考教学资源中实训指导书里面的案例,用户亦可自主进行应用拓展。
4.11 立体仓库模块:步进电机、机械手、气动滑台、底板等组成。通过独立轴位置控制可满足工件一的出入库管理,根据订单要求进行出库,进行个性化产品的组装搭配。可以与其他模块进行组合,实现不同的实训任务,实训任务设计可以参考教学资源中实训指导书里面的案例,用户亦可自主进行应用拓展。
4.12 温度控制模块:控制电路板、仪表、底板等组成。模拟过程控制中的温度控制。通过PLC输出模拟量信号进行PID调节,为产品的烘干提供恒定的温度。
可以与其他模块进行组合,实现不同的实训任务,实训任务设计可以参考教学资源中实训指导书里面的案例,用户亦可自主进行应用拓展。
4.13 仓储模块:固定底板、仓库、IO 信号采集、不锈钢拉手等组成。仓库库位装有检测传感器,通过传感器检测物料,将数据传输给其它设备。输送模块机械手通过库位信息,进行样件的出入库。
出入库控制方式和顺序,可以参考教学资源中实训指导书里面的案例,用户亦可自主进行应用拓展。
4.14 龙门搬运模块:龙门机构、仓储机构、固定底板、快速电路连接器、伺服系统、夹具等组成。
仓储机构用于储存工件套装,龙门机构用于联动轴系统控制,可进行工件套装的装配、圆弧插补轨迹、涂胶等作业,与皮带传送模块组合可进行运动跟随装配作业。
可以与其他模块进行组合,实现不同的实训任务,实训任务设计可以参考教学资源中实训指导书里面的案例,用户亦可自主进行应用拓展。
4.15 皮带传送模块:皮带输送机、编码器、固定底板、不锈钢拉手等组成。皮带输送机由铝合金型材搭建而成,结构简单,美观大方。驱动方式采用三相交流调速电机驱动,使其具有启停和调速功能。
输送机上安装光电传感器与阻挡装置,用以检测与阻挡工件。调速电机驱动皮带,运输多种不同的零件。
实训任务设计可以参考教学资源提供的实训指导书里面的案例,用户亦可自主进行应用拓展。
4.16 工量具套件包括:螺丝刀、斜口钳、尖嘴钳、剥线钳、内六角扳手、万用表等组成,主要用于设备维保检测。
★4.17 智能登录系统:系统由指纹识别模块、以太网通讯模块、继电器控制模块、触摸屏人机交互模块组成。用户通过刷指纹来识别人员身份,验证通过后由服务器输出人员信息并在触摸屏上显示,用户确认无误后可以点击"确认"按键进行设备上电,并生成二维码,可用于对接考核评价系统。
4.18 智能监控系统:用户实训及考核过程进行监控, 与计算机通讯,具有录制存储功能,供后期查验,或为其他学生提供演示视频。
五、需满足实训项目
l 可编程控制器系统连接
(1)可编程控制器输入输出回路的连接
(2)PLC和人机界面、变频器、步进、伺服等外围设备的连接
l 可编程控制器系统配置
(1)PLC、HMI与上位机通讯参数配置
(2)PLC输入输出模块、通讯模块的参数配置
l 可编程控制器系统编程
(1)PLC基本逻辑指令、应用指令的编程
(2)人机界面的编程及PLC变量的连接
l 可编程控制器系统调试
(1)I/O接口调试
(2)人机界面元器件的操控
(3)人机界面数据的输入输出操作
(4)人机界面的画面跳转及调试
(5)PLC程序的调试
(6)PLC与HMI联机程序的调试
(7)PLC与输入设备、执行机构的联机调试
l 可编程控制器系统设计
(1)独立轴速度控制系统(变频器)设计
(2)独立轴位置控制系统(步进、伺服)设计
(3)简单过程控制系统设计
(4)工业视觉系统设计
l 可编程控制器系统配置
(1)上位机的参数配置
(2)PLC的系统组态、脉冲及通讯参数配置
(3)变频器的参数配置
(4)步进系统的参数配置
(5)伺服系统的参数配置
(6)模拟量输入输出模块参数配置
(7)PID参数配置
(8)工业视觉系统配置
l 可编程控制器系统编程
(1)工程量与数字量之间转换
(2)变频器的数字量、模拟量、通讯控制编程
(3)伺服系统脉冲当量测试
(4)伺服控制系统原点回归、单段速多段速位置控制编程及数据通信
(5)调用PID指令完成温度PID参数设定
(6)过程控制中模拟量和工程量的转换
(7)过程控制程序的编写
(8)人机界面过程数据的图形化展示
(9)工业视觉系统编程
l 可编程控制器系统调试
(1)PLC程序的调试
(2)PLC与变频系统的调试
(3)速度控制系统(变频器)的参数调整及优化
(4)PLC与步进、伺服系统的调试
(5)位置控制系统(步进、伺服)的参数调整及优化
(6)温度PID的参数整定
(7)PID数据的图像化显示及优化
(8)工业视觉系统调试
六、 设备配置需包括
|
序号 |
名称 |
主要技术指标 |
单位 |
数量 |
|
1 |
实训台 |
整体尺寸≤1800mm×1200mm×800mm铝钢结构,带滚轮(滚轮带有刹车) 桌面:由12条(≤20*80*1800mm)mm铝型材组搭而成;底部空间:用钣金隔成AB2个空间A面由一个电气安装网孔板用于灵活的布置、安装控制设备;B面是一个储物空间用于存放模块设备。 |
套 |
1 |
|
2 |
工件套装 |
由3种绿、红、黄三种物料组成每种2个,每种物料由瓶身和瓶盖组成 |
套 |
1 |
|
3 |
电气接口套件 |
包含:电气接口模块、工业交换机、扩展模块、接线端子等。 |
套 |
1 |
|
4 |
外围控制器套件 |
要求档次满足或高于PLC系统配置清单中的参数 (见附表一PLC可选系统配置) |
套 |
1 |
|
5 |
PLC基础实训模块 |
由基础PLC模块、固定底板、快速电路连接器、不锈钢拉手等组成。 |
套 |
1 |
|
6 |
电气安装模块 |
标配模块由网孔板、继电器、接触器等组成 |
套 |
1 |
|
7 |
旋转供料模块 |
规格尺寸:≤240mm×255mm×202mm 由步进旋转供料机构、蜗轮蜗杆减速机、原点检查传感器、端子单元等组成。 底板:采用(240*200*10)mm的钢板,保证了设备的稳定行和水平度;底板上开有多个定位空,与桌面连接,保证了设备安装的牢固,稳定。 |
套 |
1 |
|
8 |
桁架机械手模块 |
规格尺寸:≤397mm×200.8mm×467.5mm 由气缸执行机构、固定底板、快速电路连接器、不锈钢拉手等组成。 底板:采用(≤260*90*10)mm的铝板,保证了设备的稳定行和水平度,同时降低了设备本身的重量,底板上开有多个定位空,与桌面连接,保证了设备安装的牢固,稳定。 |
套 |
1 |
|
9 |
分拣模块 |
规格尺寸:≤500mm×416mm×483mm 主要由三相异步电机、编码器、视觉系统、传送机构、不锈钢拉手、底板等组成。 底板:采用(≤500*230*10)mm的铝板,保证了设备的稳定行和水平度,同时降低了设备本身的重量,底板上开有多个定位空,与桌面连接,保证了设备安装的牢固,稳定。 |
套 |
1 |
|
10 |
输送模块 |
规格尺寸:≤650mm×220mm×257.6mm 由伺服电机、机械手、直线模组、不锈钢拉手、快速电路连接器、底板等组成。 底板:采用(≤650*220*10)mm的铝板,保证了设备的稳定行和水平度,同时降低了设备本身的重量,底板上开有多个定位空,与桌面连接,保证了设备安装的牢固,稳定。 |
套 |
1 |
|
11 |
立体仓库模块 |
规格尺寸:370mm×290mm×585mm 由步进电机、机械手、气动滑台、不锈钢拉手、快速电路连接器、底板等组成。 底板:采用(≤370*290*10)mm的铝板,保证了设备的稳定行和水平度,同时降低了设备本身的重量,底板上开有多个定位空,与桌面连接,保证了设备安装的牢固,稳定。 |
套 |
1 |
|
12 |
温度控制模块 |
规格尺寸:≤260mm×150mm×340mm 由控制电路板、仪表、气缸、指示灯、不锈钢拉手、快速电路连接器、底板等组成。 底板:采用(≤260*150*10)mm的铝板,保证了设备的稳定行和水平度,同时降低了设备本身的重量,底板上开有多个定位空,与桌面连接,保证了设备安装的牢固,稳定。 |
套 |
1 |
|
13 |
仓储模块 |
规格尺寸:≤340mm×115mm×191mm 由固定底板、仓库、IO 信号采集、快速电路连接器、不锈钢拉手等组成. 底板:采用(≤340*115*10)mm的铝板,保证了设备的稳定行和水平度,同时降低了设备本身的重量,底板上开有多个定位空,与桌面连接,保证了设备安装的牢固,稳定。 |
套 |
1 |
|
14 |
龙门搬运模块 |
规格尺寸:≤730mm×650mm×800mm 由龙门机构、仓储机构、固定底板、快速电路连接器、伺服系统、夹具等组成。 支持撑架:有截面为(40*40)mm方铝组搭建而成,由于方铝四面都有U型滑槽,提高了设备安装的灵活性。 |
套 |
1 |
|
15 |
皮带传送模块 |
规格尺寸:≤456mm×200mm×195mm 由皮带输送机、编码器、固定底板、快速电路连接器、不锈钢拉手等组成。 底板:采用(≤240*200*10)mm的铝板,保证了设备的稳定行和水平度,同时降低了设备本身的重量,底板上开有多个定位空,与桌面连接,保证了设备安装的牢固,稳定。 |
套 |
1 |
|
16 |
工量具套件 |
需要包括:工具箱、内六角扳手、尖嘴钳、剥线钳、压线钳、十字螺丝刀、一字螺丝刀、斜口钳、十字螺丝刀、一字螺丝刀、钟表螺丝刀、万用表等各一套 |
套 |
1 |
|
17 |
智能登录系统 |
该系统由指纹识别模块、以太网通讯模块、继电器控制模块、触摸屏人机交互模块组成。 |
套 |
1 |
|
18 |
智能监控系统 |
|
套 |
1 |
附表一 PLC可选系统配置
1、系统配置
|
序号 |
名称 |
型号/规格/编号 |
单位 |
数量 |
|
1 |
可编程控制器PLC |
CPU 1215C DC/DC/DC |
台 |
1 |
|
2 |
模拟量输出模块 |
AQ4 |
台 |
1 |
|
3 |
数字量输入输出模块 |
16DI/16DO |
台 |
2 |
|
4 |
通信模块 |
RS485 |
台 |
1 |
|
5 |
可编程控制器PLC |
XDH-60T4-E |
台 |
1 |
|
6 |
触摸屏 |
TGM765S-ET |
台 |
1 |
|
7 |
变频器 |
VH5-20P7 |
台 |
1 |
|
8 |
变频器 |
VH3-40P7 |
台 |
1 |
|
9 |
步进驱动器 |
DP3L-565 |
台 |
2 |
|
10 |
伺服驱动器 |
DS5C-20P1-PTA |
台 |
2 |
|
11 |
伺服驱动器 |
DS5C-20P2-PTA |
台 |
1 |
|
12 |
伺服驱动器 |
DS5C-20P4-PTA |
台 |
1 |
|
13 |
伺服电机 |
MS6H-40CS30BZ1-20P1 |
台 |
1 |
|
14 |
伺服电机 |
MS6H-60CS30B1-20P2 |
台 |
1 |
|
15 |
伺服电机 |
MS6H-40CS30B1-20P1 |
台 |
1 |
|
16 |
伺服电机 |
MS6H-60CS30B1-20P4 |
台 |
1 |
|
17 |
伺服编码器线缆 |
CP-SP-M-05 |
条 |
4 |
|
18 |
伺服电机线缆 |
CM-P07-M-05 |
条 |
4 |
|
19 |
抱闸线缆 |
CB-P03-05 |
条 |
1 |
|
20 |
工业视觉 |
视觉控制器:SP-XN620T-V210 (自带视觉软件、工控机自带加密) 相机:SV-M130C91-1/2(其中含相机网线和电源线) 光源:SI-YD100A00-W 光源控制器:SIC-Y242-A 光源延长线:SI-EC-A5 镜头:SL-DF12-C |
套 |
1 |




